量子ノイズとエラーの緩和#
元の講義のPDFはこちら です。日本語版の講義資料はこちらです。コードはバージョンアップによって、今後動かなくなることがあります。
この実験を実行するためのおおよそのQPU時間は 1 分 40秒です。
1. はじめに#
このレッスンでは、ノイズと、量子コンピューターでノイズを緩和する方法を検討します。まず、実際の量子コンピューターからのノイズプロファイルを使用するなどして、ノイズをシミュレートできるシミュレーターを使用して、ノイズの影響を調べます。次に、実際の量子コンピューターでの固有のノイズに移ります。ゼロノイズ外挿 (zero-noise extrapolation, ZNE) やゲート回転などの組み合わせによるエラー緩和の効果を見ていきます。
はじめに、いくつかのパッケージをロードします。
# !pip install qiskit qiskit_aer qiskit_ibm_runtime
# !pip install jupyter
# !pip install matplotlib pylatexenc
import qiskit
qiskit.__version__
'2.1.2'
import qiskit_aer
qiskit_aer.__version__
'0.17.1'
import qiskit_ibm_runtime
qiskit_ibm_runtime.__version__
'0.41.1'
2. エラー緩和のないノイズのシミュレーション#
Qiskit Aerは、量子コンピューティング用の古典シミュレーターです。理想的な実行だけでなく、ノイズを含めた量子回路の実行もシミュレートできます。このノートブックは、Qiskit Aerを使用してノイズありのシミュレーションを実行する方法を示します。
ノイズモデルを構築する
ノイズモデルでノイズありのsampler(シミュレーター)を構築する
ノイズありのサンプラーで量子回路を実行する
noise_model = NoiseModel()
...
noisy_sampler = Sampler(options={"backend_options": {"noise_model": noise_model}})
job = noisy_sampler.run([circuit])
2.1 テスト回路の構築#
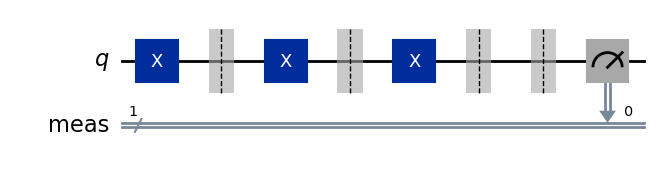
Xゲートを d 回 (d=0 … 100) 繰り返す、1量子ビットの回路を考えます。このトイモデルでオブザーバブル Z を測定します。
from qiskit.circuit import QuantumCircuit
MAX_DEPTH = 100
circuits = []
for d in range(MAX_DEPTH + 1):
circ = QuantumCircuit(1)
for _ in range(d):
circ.x(0)
circ.barrier(0)
circ.measure_all()
circuits.append(circ)
display(circuits[3].draw(output="mpl"))
from qiskit.quantum_info import SparsePauliOp
obs = SparsePauliOp.from_list([("Z", 1.0)])
obs
SparsePauliOp(['Z'],
coeffs=[1.+0.j])
2.2 ノイズモデルの構築#
ノイズありのシミュレーションを行うには、NoiseModel を指定する必要があります。このセクションでは、NoiseModel を構築する方法を示します。
まず、ノイズモデルに追加する量子(または読み出し)エラーを定義する必要があります。
from qiskit_aer.noise.errors import (
coherent_unitary_error,
amplitude_damping_error,
ReadoutError,
)
from qiskit.circuit.library import RXGate
# コヒーレント(ユニタリー)エラー: X回転エラー
# https://qiskit.github.io/qiskit-aer/stubs/qiskit_aer.noise.coherent_unitary_error.html#qiskit_aer.noise.coherent_unitary_error
OVER_ROTATION_ANGLE = 0.05
coherent_error = coherent_unitary_error(RXGate(OVER_ROTATION_ANGLE).to_matrix())
# インコヒーレントエラー: 振幅ダンピングエラー
# https://qiskit.github.io/qiskit-aer/stubs/qiskit_aer.noise.amplitude_damping_error.html#qiskit_aer.noise.amplitude_damping_error
AMPLITUDE_DAMPING_PARAM = 0.02 # in [0, 1] (0: no error)
incoherent_error = amplitude_damping_error(AMPLITUDE_DAMPING_PARAM)
# 読み出し(測定)エラー: 読み出しエラー
# https://qiskit.github.io/qiskit-aer/stubs/qiskit_aer.noise.ReadoutError.html#qiskit_aer.noise.ReadoutError
PREP0_MEAS1 = 0.03 # P(1|0): 0を用意したが、1を測定してしまう確率
PREP1_MEAS0 = 0.08 # P(0|1): 1を用意したが、0を測定してしまう確率
readout_error = ReadoutError(
[[1 - PREP0_MEAS1, PREP0_MEAS1], [PREP1_MEAS0, 1 - PREP1_MEAS0]]
)
from qiskit_aer.noise import NoiseModel
noise_model = NoiseModel()
noise_model.add_quantum_error(coherent_error.compose(incoherent_error), "x", (0,))
noise_model.add_readout_error(readout_error, (0,))
2.3 ノイズモデルを使ったノイズありsamplerの構築#
from qiskit_aer.primitives import SamplerV2 as Sampler
noisy_sampler = Sampler(options={"backend_options": {"noise_model": noise_model}})
2.4 ノイズありsamplerで量子回路を実行#
job = noisy_sampler.run(circuits, shots=400)
result = job.result()
result[0].data.meas.get_counts()
{'0': 386, '1': 14}
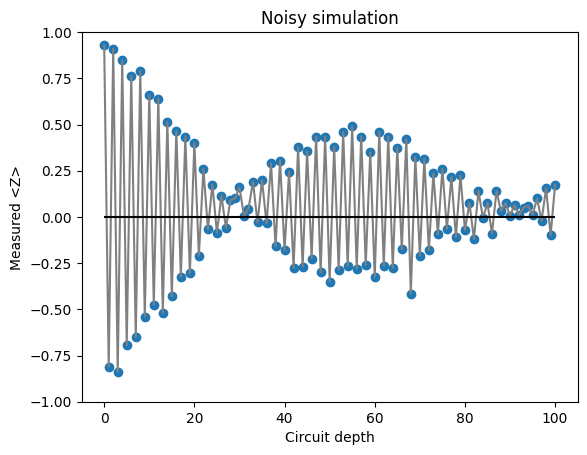
2.5 結果の表示#
import matplotlib.pyplot as plt
plt.title("Noisy simulation")
ds = list(range(MAX_DEPTH + 1))
plt.plot(
ds,
[result[d].data.meas.expectation_values(["Z"]) for d in ds],
color="gray",
linestyle="-",
)
plt.scatter(ds, [result[d].data.meas.expectation_values(["Z"]) for d in ds], marker="o")
plt.hlines(0, xmin=0, xmax=MAX_DEPTH, colors="black")
plt.ylim(-1, 1)
plt.xlabel("Circuit depth")
plt.ylabel("Measured <Z>")
plt.show()
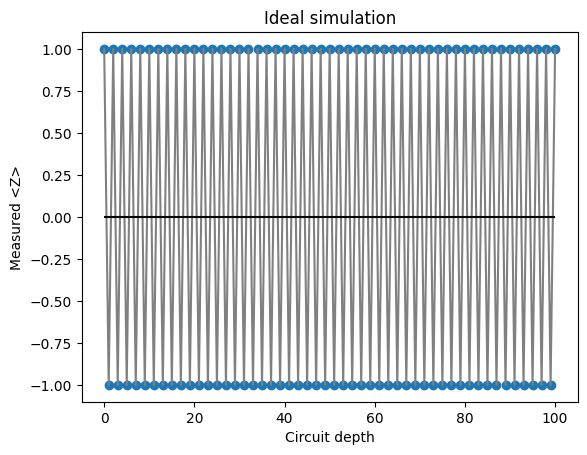
2.6 理想的なシミュレーション#
ideal_sampler = Sampler()
job_ideal = ideal_sampler.run(circuits)
result_ideal = job_ideal.result()
plt.title("Ideal simulation")
ds = list(range(MAX_DEPTH + 1))
plt.plot(
ds,
[result_ideal[d].data.meas.expectation_values(["Z"]) for d in ds],
color="gray",
linestyle="-",
)
plt.scatter(
ds, [result_ideal[d].data.meas.expectation_values(["Z"]) for d in ds], marker="o"
)
plt.hlines(0, xmin=0, xmax=MAX_DEPTH, colors="black")
plt.xlabel("Circuit depth")
plt.ylabel("Measured <Z>")
plt.show()
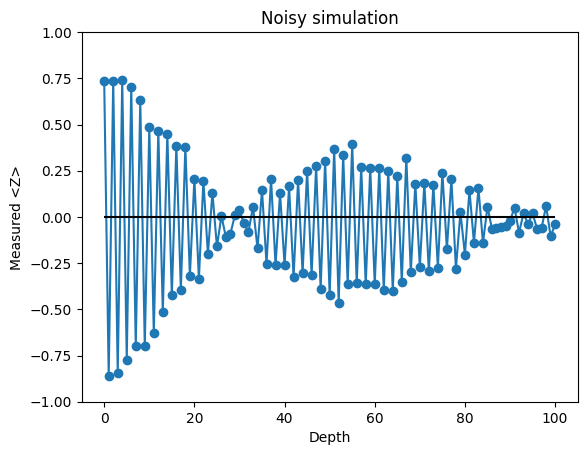
2.7 演習問題#
以下のコードを微調整することで、
25倍のショット数 (10_000 shots) を試して、より滑らかなプロットが得られるようにします
ノイズパラメータ(OVER_ROTATION_ANGLE、AMPLITUDE_DAMPING_PARAM、PREP0_MEAS1、またはPREP1_MEAS0)を変更し、プロットがどのように変化するかを確認します
OVER_ROTATION_ANGLE = 0.05
coherent_error = coherent_unitary_error(RXGate(OVER_ROTATION_ANGLE).to_matrix())
AMPLITUDE_DAMPING_PARAM = 0.02 # in [0, 1] (0: no error)
incoherent_error = amplitude_damping_error(AMPLITUDE_DAMPING_PARAM)
PREP0_MEAS1 = 0.1 # P(1|0): 0を用意したが、1を測定してしまう確率
PREP1_MEAS0 = 0.05 # P(0|1): 1を用意したが、0を測定してしまう確率
readout_error = ReadoutError(
[[1 - PREP0_MEAS1, PREP0_MEAS1], [PREP1_MEAS0, 1 - PREP1_MEAS0]]
)
noise_model = NoiseModel()
noise_model.add_quantum_error(coherent_error.compose(incoherent_error), "x", (0,))
noise_model.add_readout_error(readout_error, (0,))
options = {
"backend_options": {"noise_model": noise_model},
}
noisy_sampler = Sampler(options=options)
job = noisy_sampler.run(circuits, shots=400)
result = job.result()
plt.title("Noisy simulation")
ds = list(range(MAX_DEPTH + 1))
plt.plot(
ds,
[result[d].data.meas.expectation_values(["Z"]) for d in ds],
marker="o",
linestyle="-",
)
plt.hlines(0, xmin=0, xmax=MAX_DEPTH, colors="black")
plt.ylim(-1, 1)
plt.xlabel("Depth")
plt.ylabel("Measured <Z>")
plt.show()
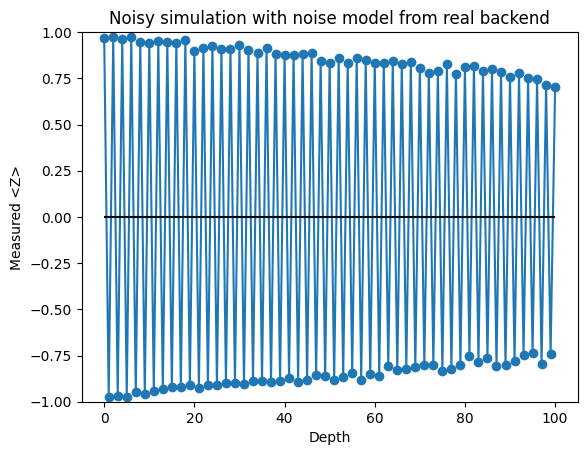
2.8 よりリアルなノイズシミュレーション#
from qiskit_aer import AerSimulator
from qiskit_ibm_runtime import SamplerV2 as Sampler, QiskitRuntimeService
service = QiskitRuntimeService()
real_backend = service.least_busy(
operational=True, simulator=False, min_num_qubits=127
)
real_backend
<IBMBackend('ibm_fez')>
aer = AerSimulator.from_backend(real_backend)
noisy_sampler = Sampler(mode=aer)
job = noisy_sampler.run(circuits)
result = job.result()
plt.title("Noisy simulation with noise model from real backend")
ds = list(range(MAX_DEPTH + 1))
plt.plot(
ds,
[result[d].data.meas.expectation_values(["Z"]) for d in ds],
marker="o",
linestyle="-",
)
plt.hlines(0, xmin=0, xmax=MAX_DEPTH, colors="black")
plt.ylim(-1, 1)
plt.xlabel("Depth")
plt.ylabel("Measured <Z>")
plt.show()
3. エラー緩和を伴った実機による量子計算#
このパートでは、Qiskit Estimatorを使用してエラー緩和された結果(期待値)を取得する方法を示します。 1次元イジングモデルの時間発展をシミュレートするために6量子ビットのトロッター化回路を使って、時間ステップ数に対してエラーがどのようにスケーリングされるかを確認します。
backend = service.least_busy(
operational=True, simulator=False, min_num_qubits=127
)
backend
<IBMBackend('ibm_fez')>
NUM_QUBITS = 6
NUM_TIME_STEPS = list(range(8))
RX_ANGLE = 0.1
RZZ_ANGLE = 0.1
3.1 回路の構築#
# 異なるtime steps数で回路を構築する
circuits = []
for n_steps in NUM_TIME_STEPS:
circ = QuantumCircuit(NUM_QUBITS)
for i in range(n_steps):
# rx layer
for q in range(NUM_QUBITS):
circ.rx(RX_ANGLE, q)
# 1st rzz layer
for q in range(1, NUM_QUBITS - 1, 2):
circ.rzz(RZZ_ANGLE, q, q + 1)
# 2nd rzz layer
for q in range(0, NUM_QUBITS - 1, 2):
circ.rzz(RZZ_ANGLE, q, q + 1)
circ.barrier() # need not to optimize the circuit
# Uncompute stage
for i in range(n_steps):
for q in range(0, NUM_QUBITS - 1, 2):
circ.rzz(-RZZ_ANGLE, q, q + 1)
for q in range(1, NUM_QUBITS - 1, 2):
circ.rzz(-RZZ_ANGLE, q, q + 1)
for q in range(NUM_QUBITS):
circ.rx(-RX_ANGLE, q)
circuits.append(circ)
理想的な出力を事前に知るために、元の回路 \(U\) が適用される第1段階と、それを逆にした \(U^\dagger\) の第2段階から構成される compute-uncompute 回路を使用します。 このような回路の理想的な結果は、入力状態と同じ \(|000000\rangle\) であり、これは、パウリ・オブザーバブルに対してありふれた期待値 (たとえば、\(\langle IIIIIZ \rangle = 1\)) を持つことに注意してください。
# タイムステップ2の回路を表示
circuits[2].draw(output="mpl")
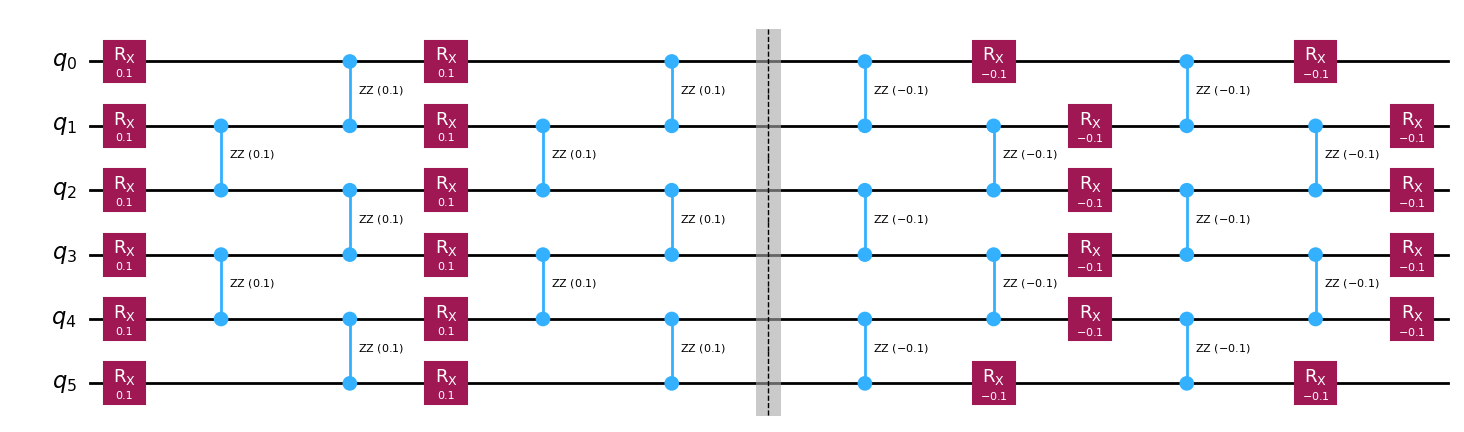
注: 上のように、\(k\) の時間ステップを持つ回路には、\(4k\) 個のの 2 量子ビット・ゲート・レイヤーがあります。
obs = SparsePauliOp.from_sparse_list([("Z", [0], 1.0)], num_qubits=NUM_QUBITS)
obs
SparsePauliOp(['IIIIIZ'],
coeffs=[1.+0.j])
3.2 回路をトランスパイル#
optimization_level=1 でバックエンドの回路をトランスパイルします。
from qiskit.transpiler.preset_passmanagers import generate_preset_pass_manager
pm = generate_preset_pass_manager(optimization_level=1, backend=backend)
isa_circuits = pm.run(circuits)
display(isa_circuits[2].draw("mpl", idle_wires=False, fold=-1))

3.3 Estimator を実行 (異なるresilience levelsを用いて)#
resilience level (‘estimator.options.resilience_level’) を設定することは、Qiskit Estimator でエラー緩和を適用する最も簡単な方法です。Estimatorは、以下のresilience levelをサポートしています(2024/06/28時点)。詳細は、 エラー緩和の設定のガイドを参照してください。
Resilience Level |
定義 |
技術 |
|---|---|---|
0 |
緩和なし |
なし |
1 [デフォルト] |
最小限の緩和コスト:読み出しエラーに関連するエラーを緩和 |
Twirled Readout Error eXtinction (TREX) 測定トワリング |
2 |
程度の緩和コスト。通常、estimator のバイアスを低減しますが、ゼロバイアスであることは保証されません。 |
Level 1 +ゼロノイズ外挿(ZNE)およびゲートトワリング |
from qiskit_ibm_runtime import Batch
from qiskit_ibm_runtime import EstimatorV2 as Estimator
jobs = []
job_ids = []
with Batch(backend=backend):
for resilience_level in [0, 1, 2]:
estimator = Estimator()
estimator.options.resilience_level = resilience_level
job = estimator.run(
[(circ, obs.apply_layout(circ.layout)) for circ in isa_circuits]
)
job_ids.append(job.job_id())
print(f"Job ID (rl={resilience_level}): {job.job_id()}")
jobs.append(job)
Job ID (rl=0): d35mmbgitjus73f4gh8g
Job ID (rl=1): d35mmbsgenls73cc69pg
Job ID (rl=2): d35mmbo0sqis7396t40g
# check job status
for job in jobs:
print(job.status())
DONE
DONE
DONE
# REPLACE WITH YOUR OWN JOB IDS
jobs = [service.job(job_id) for job_id in job_ids]
# Get results
results = [job.result() for job in jobs]
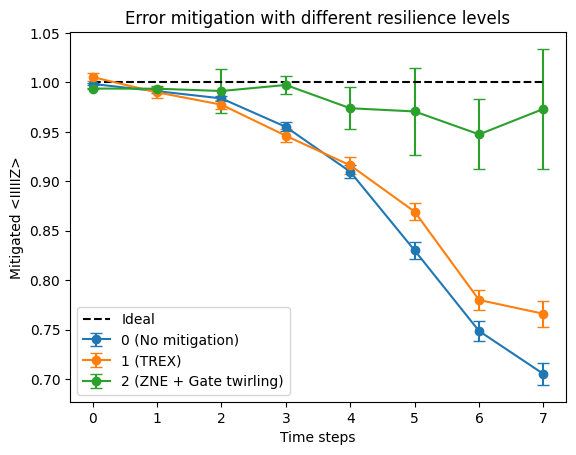
3.4 結果のプロット#
plt.title("Error mitigation with different resilience levels")
labels = ["0 (No mitigation)", "1 (TREX)", "2 (ZNE + Gate twirling)"]
steps = NUM_TIME_STEPS
for result, label in zip(results, labels):
plt.errorbar(
x=steps,
y=[result[s].data.evs for s in steps],
yerr=[result[s].data.stds for s in steps],
marker="o",
linestyle="-",
capsize=4,
label=label,
)
plt.hlines(
1.0, min(steps), max(steps), linestyle="dashed", label="Ideal", colors="black"
)
plt.xlabel("Time steps")
plt.ylabel("Mitigated <IIIIIZ>")
plt.legend()
plt.show()
4. (オプション) エラー緩和オプションのカスタマイズ#
以下に示すように、オプションを使用してエラー緩和手法の適用をカスタマイズできます。
# TREX
estimator.options.twirling.enable_measure = True
estimator.options.twirling.num_randomizations = "auto"
estimator.options.twirling.shots_per_randomization = "auto"
# Gate twirling
estimator.options.twirling.enable_gates = True
# ZNE
estimator.options.resilience.zne_mitigation = True
estimator.options.resilience.zne.noise_factors = [1, 3, 5]
estimator.options.resilience.zne.extrapolator = ("exponential", "linear")
# Dynamical decoupling
estimator.options.dynamical_decoupling.enable = True # Default: False
estimator.options.dynamical_decoupling.sequence_type = "XX"
# Other options
estimator.options.default_shots = 10_000
エラー緩和オプションの詳細については、次のガイドと API リファレンスを参照してください。
© IBM Corp., 2017-2025